
Miękkie roboty często przedstawia się jako łagodnych krewniaków przemysłowych maszyn. Są one na tyle elastyczne i bezpieczne, że mogą przeciskać się przez rafy koralowe albo wpełzać w zatkane rury, nie niszcząc wszystkiego po drodze. Prawdziwym wyzwaniem nie jest jednak samo wprawienie takich miękkich robotów w ruch, lecz nadanie takim konstrukcjom inteligencji, która jest fizycznie wbudowana w odkształcalne ciała, a nie przyjmuje postać sztywnego układu. Ten problem rozwiązali właśnie naukowcy z National University of Singapore (NUS), twierdząc, że przybliżyli tę wizję o krok dzięki miękkiemu robotowi inspirowanemu płaszczką, zasilanemu elastycznymi bateriami, które działają tym lepiej, im intensywniej robot pływa.
Pola magnetyczne kluczem do wyjątkowości “robotycznej płaszczki”
Praca specjalistów, która została opisana w Science Advances, pokazuje, że te same pola magnetyczne, które poruszają płetwami robota, mogą jednocześnie stabilizować procesy elektrochemiczne w pokładowym źródle zasilania. Innymi słowy, mogą wydłużać żywotność akumulatora nawet wtedy, gdy korpus robota wygina się i skręca w wodzie. Tak się składa, że sercem systemu są elastyczne akumulatory cynkowo-manganowe wykorzystujące dwutlenek manganu. Jest to chemia tańsza i zazwyczaj bezpieczniejsza w porównaniu do klasyki litowo-jonowej, ale zwykle cierpiąca na ograniczoną żywotność cykliczną.
Czytaj też: Ochrzczone paliwo uderzy w elektromobilność? Dolali wodę do diesla, a efekty przerosły ich oczekiwania

Zespół z NUS zamknął cynkowo-magnanowe ogniwa w miękkim silikonie i ułożył je w stos pionowo wewnątrz korpusu robota, zamiast rozkładać je na sztywnej, bocznej warstwie. Taka pionowa integracja uwalnia powierzchnię na siłowniki i czujniki, a jednocześnie pozwala utrzymać całą konstrukcję cienką i na tyle elastyczną, by zginała się jak prawdziwa ryba. Magnetyzm jest tu kluczowym haczykiem, bo płetwy robota-płaszczki zostały wykonane z magnetycznych elastomerów, które odkształcają się pod wpływem pól generowanych przez cewki lub układ elektromagnesów znajdujący się na zewnątrz zbiornika. Te same pola przenikają przez ułożone w stos ogniwa, delikatnie modyfikując przepływ naładowanych cząstek. Przy takim magnetycznym “dopingu” elastyczny akumulator zachowuje około 57 procent początkowej pojemności po 200 cyklach ładowania i rozładowania, a więc mniej więcej dwukrotnie więcej niż identyczne ogniwa pracujące bez pola magnetycznego.
Jak to działa?
Leżąca u podstaw fizyka to mieszanka podręcznikowego elektromagnetyzmu i chemii ciała stałego. Poruszające się w elektrolicie jony cynku doświadczają w polu magnetycznym siły Lorentza, która wygładza strumień jonów docierających do metalicznej anody, zamiast umożliwiać im wzrost w postaci niebezpiecznych, igiełkowatych dendrytów. Jednocześnie pole wydaje się porządkować spiny elektronów w katodzie z tlenku manganu, wzmacniając sieć krystaliczną i spowalniając degradację. Autorzy opisują tę kombinację jako podwójną magneto-elektrochemiczną stabilizację.
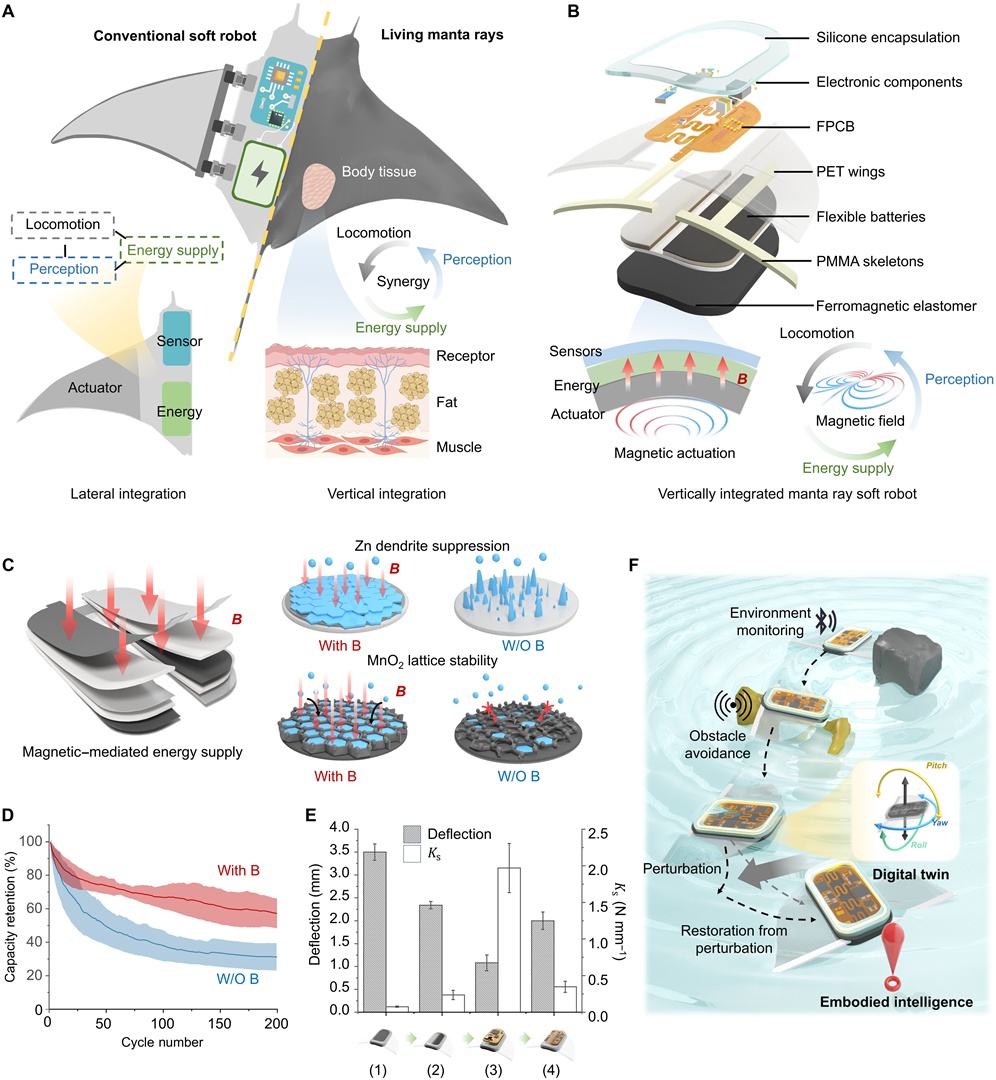
Aby pokazać, że nie chodzi wyłącznie o sprytną sztuczkę z akumulatorami, zespół zbudował robota-płaszczkę z miękkimi magnetycznymi siłownikami, wspomnianymi ogniwami i lekkim, hybrydowym układem elektroniki odpowiedzialnym za czujniki i łączność bezprzewodową. Zewnętrzne cewki wytwarzają pola magnetyczne, które sprawiają, że płetwy uderzają o wodę, a korpus się zgina, generując ciąg i umożliwiając sterowanie. W testach robot wykonywał proste manewry na wprost, skręty o 90 stopni i bardziej złożone trajektorie, jednocześnie transmitując dane na żywo do komputera, który odtwarzał jego ruch w cyfrowym modelu bliźniaczym.
Czytaj też: Ścieli rachunki o ponad połowę. Jedna pompa ciepła to przeżytek na tle tej “prywatnej elektrowni”
Najciekawsze jest to, jak dużą część logiki sterowania przeniesiono do samego ciała robota. Czujniki inercyjne wykrywają nagłe zmiany, gdy robot uderzy w przeszkodę lub zostanie zepchnięty z kursu przez falę, a pokładowy kontroler automatycznie koryguje wzór pracy płetw i postawę korpusu. Dzięki temu robot potrafi przeciskać się przez wąskie szczeliny, wykonywać zawrotki na ograniczonej przestrzeni oraz dostatecznie szybko kompensować odchylenia w osi pionowej, poprzecznej i w przechyle, a to po to, by utrzymać stabilny kurs, podczas gdy czujniki temperatury mapują gradienty termiczne w wodzie.
Co teraz stanie się z robotem?
Nie jest to pierwsza miękka konstrukcja inspirowana zwierzętami morskimi. Inne zespoły specjalistów zbudowały już w przeszłości roboty, które dzięki płetwom wzorowanym na biologii osiągają prędkości rzędu sześciu długości ciała na sekundę, ale wiele z nich wciąż polega na przewodach z powietrzem pod ciśnieniem lub sztywnych zewnętrznych pakietach zasilania. Tym, co więc wyróżnia pracę NUS, jest celowe wykorzystanie jednej zasady fizycznej (pola magnetycznego, które i tak napędza ruch) do jednoczesnego zarządzania energią w elastycznym systemie zasilania. Płaszczka wciąż jednak zależy od silnych zewnętrznych magnesów lub układów cewek, więc na razie pływa tylko w ściśle kontrolowanych zbiornikach, a nie w prawdziwych rurociągach ani na otwartym oceanie. Zespół chce teraz przenieść tę samą koncepcję na inne akumulatory oraz elastyczne włókna gromadzące energie, zbliżając się tym samym do miękkich robotów, w których ruch, czucie i zasilanie staną się naprawdę nierozdzielne.
