O tym, jak sobie poradzili, możemy przeczytać w dwóch artykułach dostępnych na łamach Science Robotics. Pierwszy jest poświęcony perypetiom badaczy z Uniwersytetu Johannesa Keplera w Linzu, którzy opisali genezę swojego projektu oraz skuteczność stworzonego tuszu. Drugi traktuje natomiast o trudnościach, na jakie napotykają inżynierowie zajmujący się drukowaniem miękkich robotów z biodegradowalnych materiałów.
Czytaj też: Psy-roboty patrolujące granice USA w automatycznym trybie w ramach testów zautomatyzowanych patroli
Miękkie roboty są zazwyczaj tworzone w celu naśladowania organizmów żyjących w wodzie. W przyszłości taka technologia mogłaby doprowadzić do powstania niewielkich maszyn zdolnych do pływania wewnątrz ludzkiego organizmu. Do ich zadań mogłoby należeć między innymi transportowanie leków czy naprawa uszkodzonych tkanek. Jednym z głównych problemów trapiących dotychczas miękkie roboty był fakt, że nie są one biodegradowalne.
Miękkie roboty składają się z wysoce elastycznych materiałów
Szukając rozwiązania tego problemu naukowcy z Austrii użyli cukru i żelatyny, dzięki którym powstały obiekty przypominające galaretkę. Dodanie innych materiałów wzmocniło powstałe roboty. Dzięki kwasowi cytrynowemu wzrosła ich odporność na pleśnienie, podczas gdy gliceryna zwiększyła ich zdolności w zakresie zanurzania w wodzie. Członkowie zespołu badawczego przetestowali różne konfiguracje w celu stworzenia atramentu, który mógłby być używany do produkcji obiektów 3D.
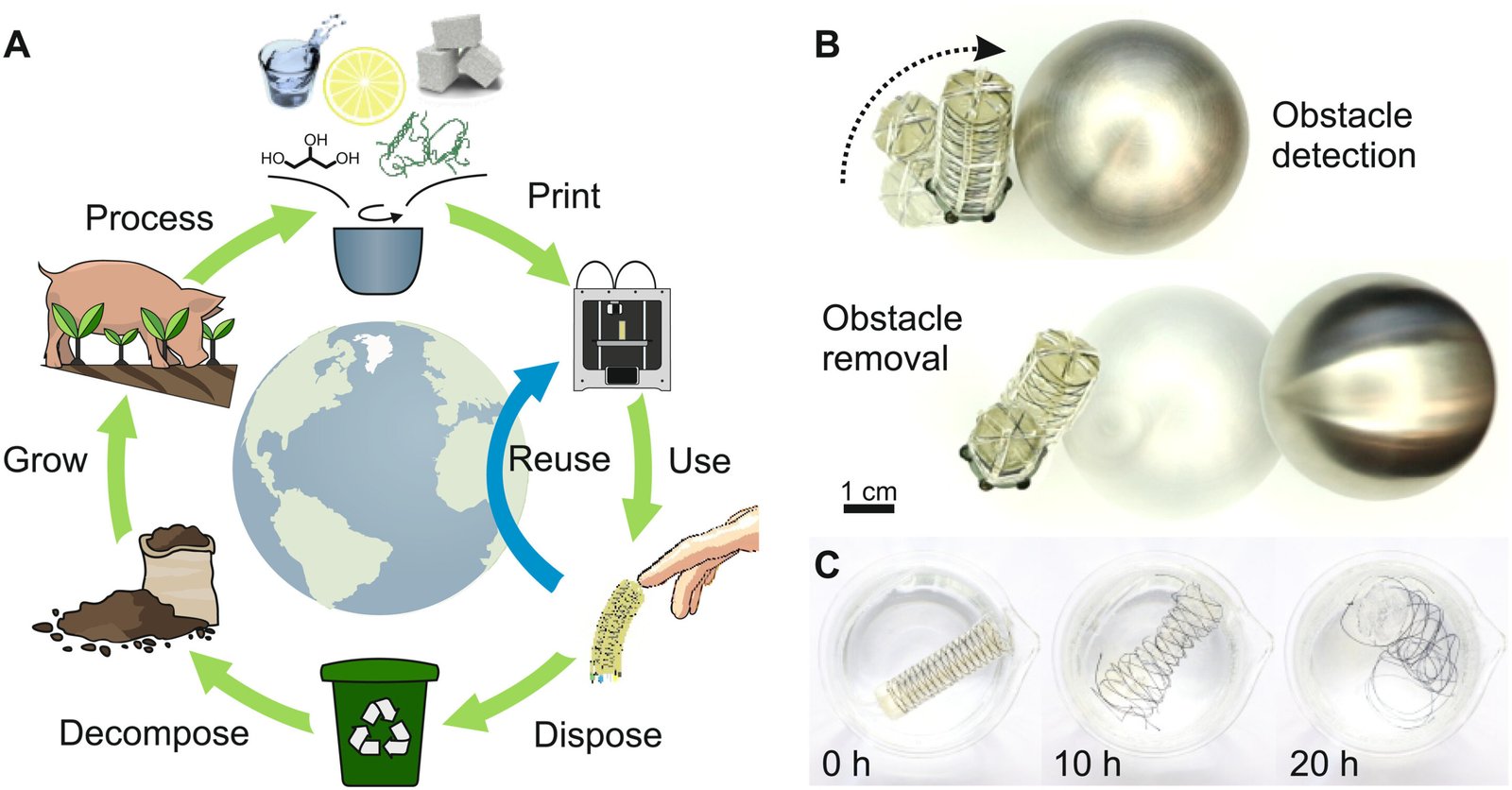
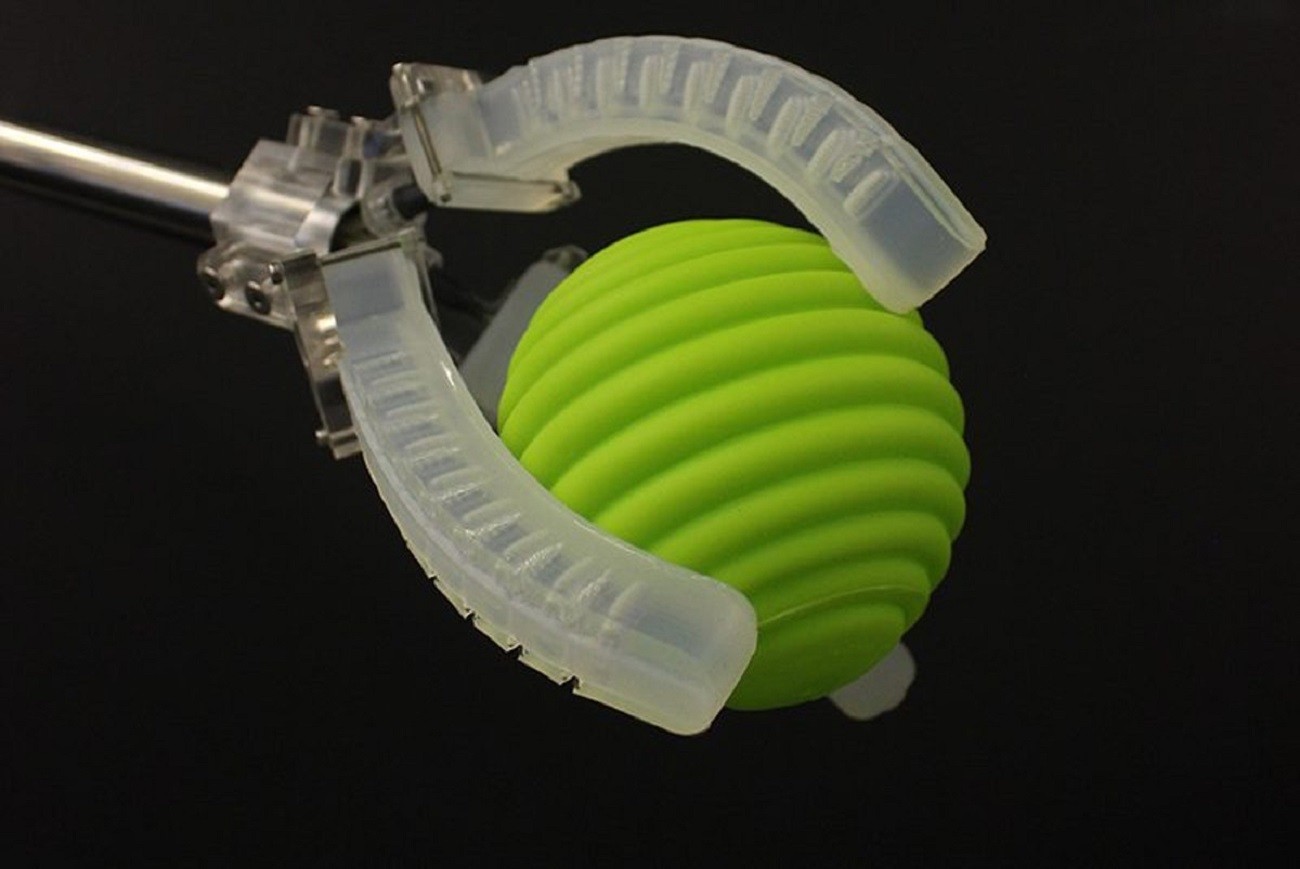
Kiedy już powstał materiał o oczekiwanych właściwościach, naukowcy podgrzali go, aby stał się wystarczająco miękki, by dało się go przecisnąć przez dyszę drukującą. Następnie wykorzystali drukarkę 3D znajdującą się w chłodnym pomieszczeniu, dzięki czemu tusz stosunkowo szybko twardniał, utrzymując pożądany kształt. Jednym z pierwszych stworzonych w ten sposób obiektów był miękki siłownik napędzany pneumatycznie.
Czytaj też: Reaktory jądrowe z drukarki, czyli jak druk 3D zrewolucjonizuje rynek energii
Co jest szczególnie ważne, to możliwość ponownego wykorzystania materiału użytego do wydrukowania wspomnianego siłownika. Kolejnym krokiem w działaniach grupy badawczej było stworzenie rozciągliwych czujników falowodowych, które współpracowały z diodami LED. Następnie naukowcy połączyli falowód z siłownikiem, dzięki czemu uzyskali działającego miękkiego robota. Łącząc ze sobą trzy falowody i podłączając je do kontrolera byli natomiast w stanie zmieniać stopień odkształcenia falowodów.