Za projektem stoją przedstawiciele szwajcarskiej ETH w Zurychu oraz pracownicy firmy Nvidia. Wspólnymi siłami zespołowi udało się wykorzystać symulację zwaną ANYMals do przeprowadzenia wirtualnego treningu. Miał on na celu przećwiczenie pokonywania różnego rodzaju przeszkód, takich jak strome zbocza czy wysokie stopnie. Kiedy tylko robotowi udało się wykonać zadanie, oprogramowanie serwowało mu kolejne, jeszcze trudniejsze.
Czytaj też: Robot LEONARDO jest wyjątkowy. Może chodzić, latać i… jeździć na desce
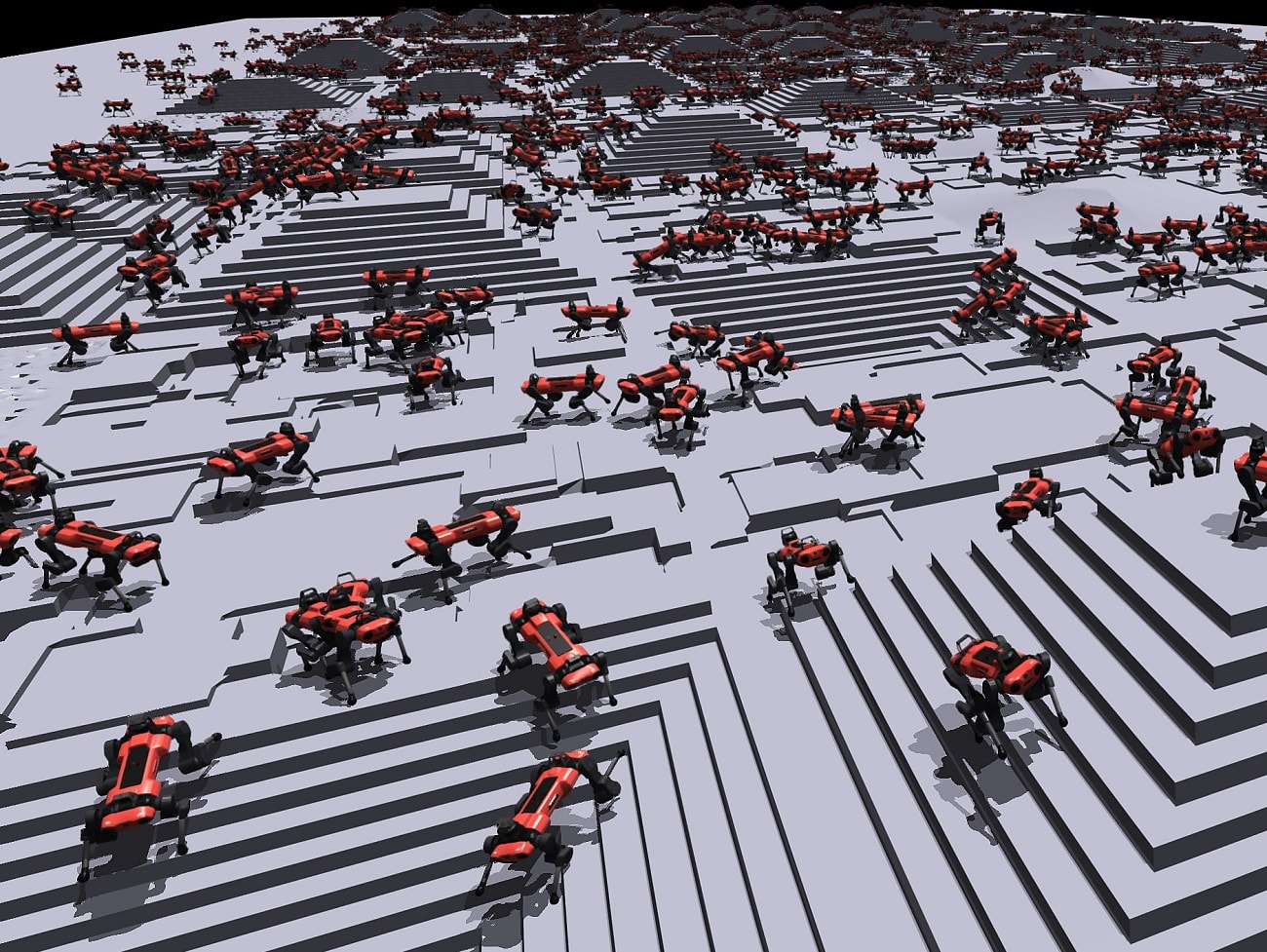
W ten sposób “mózg” maszyny, oparty na algorytmach, rozwijał się, zbierając coraz więcej informacji na temat sposobów poruszania. Doprowadziło to do osiągnięcia zaawansowania, jakiego nie odnotowano w tej kwestii w przypadku innych systemów opartych na mobilnej sztucznej inteligencji. Trenowana na tych zasadach armia robotów liczy 4000 przedstawicieli, którzy wyglądem przypominają psy.
Co ciekawe, o ile maszyny stosunkowo szybko opanowały chodzenie po schodach i pod górę, to miały znacznie więcej trudności w przypadku poruszania się po bardziej nachylonych formach terenu. Szczególnie problematyczne okazało się… zjeżdżanie po zboczach. Sytuacja stała się szczególnie widoczna, kiedy algorytm został przetestowany w rzeczywistości. Wtedy też roboty wyposażone w czujniki doświadczały problemów między innymi podczas prób szybszego poruszania się.
Roboty ćwiczą umiejętność chodzenia w wirtualnym świecie, by potem sprawdzić się w rzeczywistości
Jak twierdzą członkowie zespołu realizującego projekt, problemy wynikają przede wszystkim z różnic związanych z odmiennym postrzeganiem wirtualnej i faktycznej rzeczywistości przez czujniki zamontowane na głowach czworonożnych maszyn. Gdy te poruszają nogami, algorytm monitoruje, w jaki sposób przyczynia się to do zdolności robota do dalszego przemieszczania się. W oparciu o te informacje system dostosowuje dalsze komendy związane ze sterowaniem maszyną.
Tego typu rozwiązania, choć nadal nie są idealne, mogą stanowić ogromny krok w kierunku robotyzacji codziennego życia. W grę wchodzi nawet wykorzystanie robotów w sektorze przemysłowym i usługowym. Poza tym, coraz częściej mówi się o samouczących się maszynach zdolnych do zdefiniowania na nowo pojęcia mobilnych systemów opartych na sztucznej inteligencji.
