Nowe robotyczne szczypce z GelSight
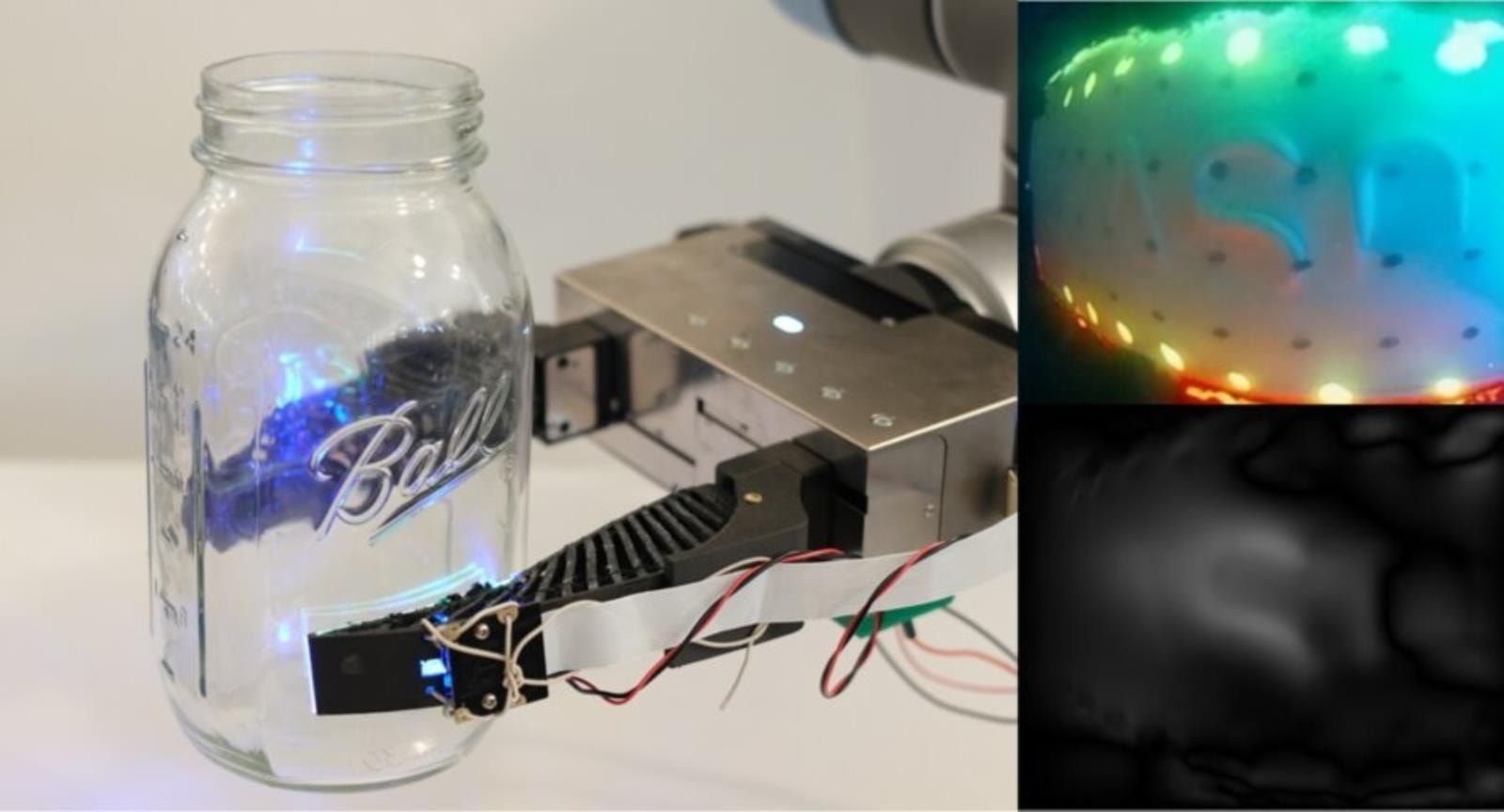
Na oddziale CSAIL w Massachusetts Institute of Technology profesor Edward Adelson z pomocą doktorantki Sandrt Liu opracował nowy robotyczny chwytak, który wykorzystuje nowatorskie palce “GelSight Fin Ray”, które, podobnie jak ludzka ręka, są wystarczająco giętkie, by manipulować przedmiotami. Co je wyróżnia na tle innych podobnych? Specjalne czujniki dotyku, które mogą dorównać lub nawet przewyższyć czułość ludzkiej skóry.
Czytaj też: Wydajność Intel Arc A770 w OpenCL poddaje w wątpliwość potencjał flagowca
Opracowany przez tę dwójkę chwytak składa się z dwóch elastycznych, promienistych palców, które dopasowują się do kształtu przedmiotu, z którym się stykają. Te zostały zmontowane z elastycznych tworzyw sztucznych wykonanych na drukarce 3D, co jest dość standardowym rozwiązaniem w tej dziedzinie. Jednak zamiast usztywniającego pręta wzdłuż palców, naukowcy postawili na puste wnętrze, co zapewniło miejsce na kamerę optyczną i czujniki.
Czytaj też: Szukacie nowej karty graficznej? NVIDIA ma coś ważnego do powiedzenia, ale sensu w tym nie widzimy
Kamera jest zamontowana na półsztywnym podłożu na jednym końcu wydrążonej wnęki, która sama jest oświetlona diodami LED. Jest też skierowana w stronę GelSight, czyli warstwy “wkładek sensorycznych” wykonanych z żelu silikonowego, które są przyklejone do cienkiej warstwy materiału akrylowego. Ten z kolei jest przymocowany do plastikowego palca znajdującego się na przeciwległym końcu wewnętrznej wnęki.
W praktyce po dotknięciu obiektu palec płynnie zagina się wokół niego, dopasowując się do jego konturów. Z kolei dzięki dokładnemu określeniu, w jaki sposób arkusze silikonu i akrylu odkształcają się podczas tej interakcji, kamera – wraz z towarzyszącymi jej algorytmami obliczeniowymi – może ocenić ogólny kształt obiektu, chropowatość jego powierzchni, orientację w przestrzeni oraz siłę przyłożoną przez (i przekazaną) każdy palec. Dzięki temu chwytak radził sobie nawet z małymi śrubokrętami czy tubką farby, a nawet odczytywał napisy na słoiku.
Czytaj też: Polska firma rozwija wielozadaniowego drona hybrydowego PROMETHEUS. Co o nim wiemy?
Po potwierdzeniu skuteczności działania chwytaków i czujników, które opierają się na niedrogich komponentach, bo kamerze, żelu i diodach LED, naukowcy wierzą, że “możliwe będzie stworzenie czujników, które będą zarówno praktyczne, jak i niedrogie”. Obecnie przewidują wiele możliwych zastosowań swojego dzieła, ale najpierw zastanawiają się nad pewnymi ulepszeniami.
