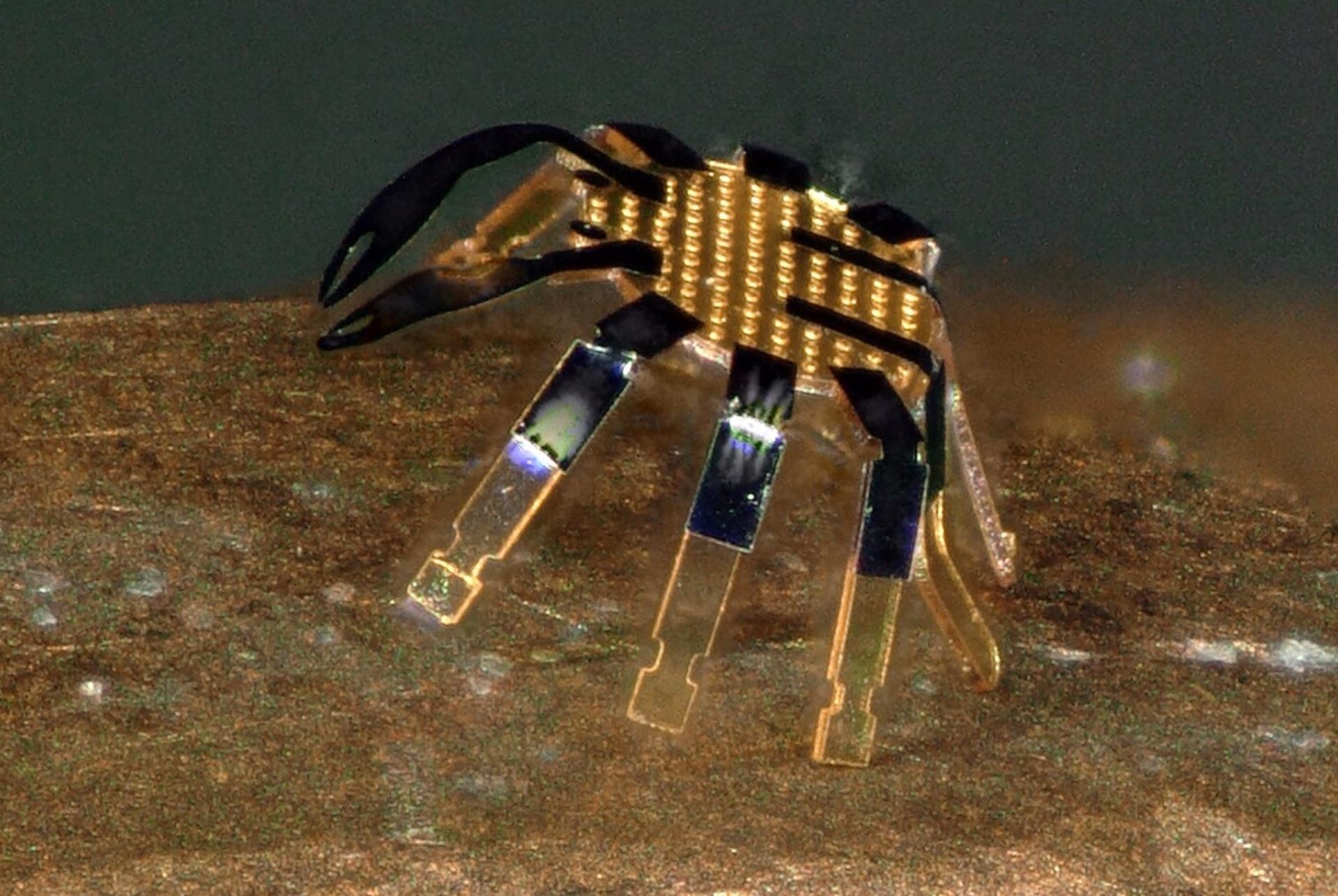
Najmniejszy zdalnie sterowany robot, czyli mini-krab ze zmyślnie manipulowanego materiału pamiętającego kształt
Cała wyjątkowość tych krabów-robocików kryje się właśnie w materiale, z którego zostały wyprodukowane. Proces ich produkcji sprowadza się do tworzenia płaskich struktur przy użyciu wysokiej temperatury, które następnie przyklejono do rozciągniętego gumowego podłoża w miejscach łączenia się korpusu z nóżkami. Przynajmniej w przypadku tych najbardziej tradycyjnych robotów, bo kilka eksperymentalnych zaszalało nieco z formą.
Czytaj też: Ta folia żelowa zapewnia kilka litrów wody pitnej dziennie. Wysysa ją nawet z suchego powietrza

Następnie guma została rozluźniona, co zmniejszyło powierzchnię stóp robotów i spowodowało, że oderwały się one od powierzchni w kontrolowanym procesie i przyjęły “trójwymiarową pozycję w stanie schłodzonym”. Na nią następnie nałożono szklaną powłokę, która utrzymywała je w formie do czasu ogrzania.
Czytaj też: Lasery tnące stal nie są w stanie go zniszczyć. Naukowcy stworzyli wyjątkowe lustro diamentowe
Robotyka to ekscytująca dziedzina badań, a rozwój robotów w mikroskali to ciekawy temat do akademickich poszukiwań. Można sobie wyobrazić mikroroboty jako narzędzia do naprawy lub montażu małych struktur czy maszyn w przemyśle albo jako asystentów chirurgicznych do udrażniania zatkanych tętnic, tamowania krwawienia wewnętrznego lub usuwania guzów nowotworowych – wszystko to w ramach procedur minimalnie inwazyjnych– powiedział profesor inżynierii i materiałoznawstwa John A. Rogers.

Czytaj też: Kaspijski Potwór i Łuń, czyli sowieckie ekranoplany. Czym były te statko-samoloty i dlaczego powracają?
To sprawiło, że roboty są stworzone z łącznie trzech elementów, a manipulacja nimi odbywa się poprzez zmianę ich temperatury. Realizowane jest to przez laser skanujący, który nagrzewa je, ale na wystarczająco krótko, aby proces można było powtarzać w regularnych cyklach aż 10 razy na sekundę. W testach zespół badaczy osiągnął średnią prędkość rzędu połowy długości ciała na sekundę, wyznaczając kierunek chodu na podstawie kierunku naświetlana laserem.
