
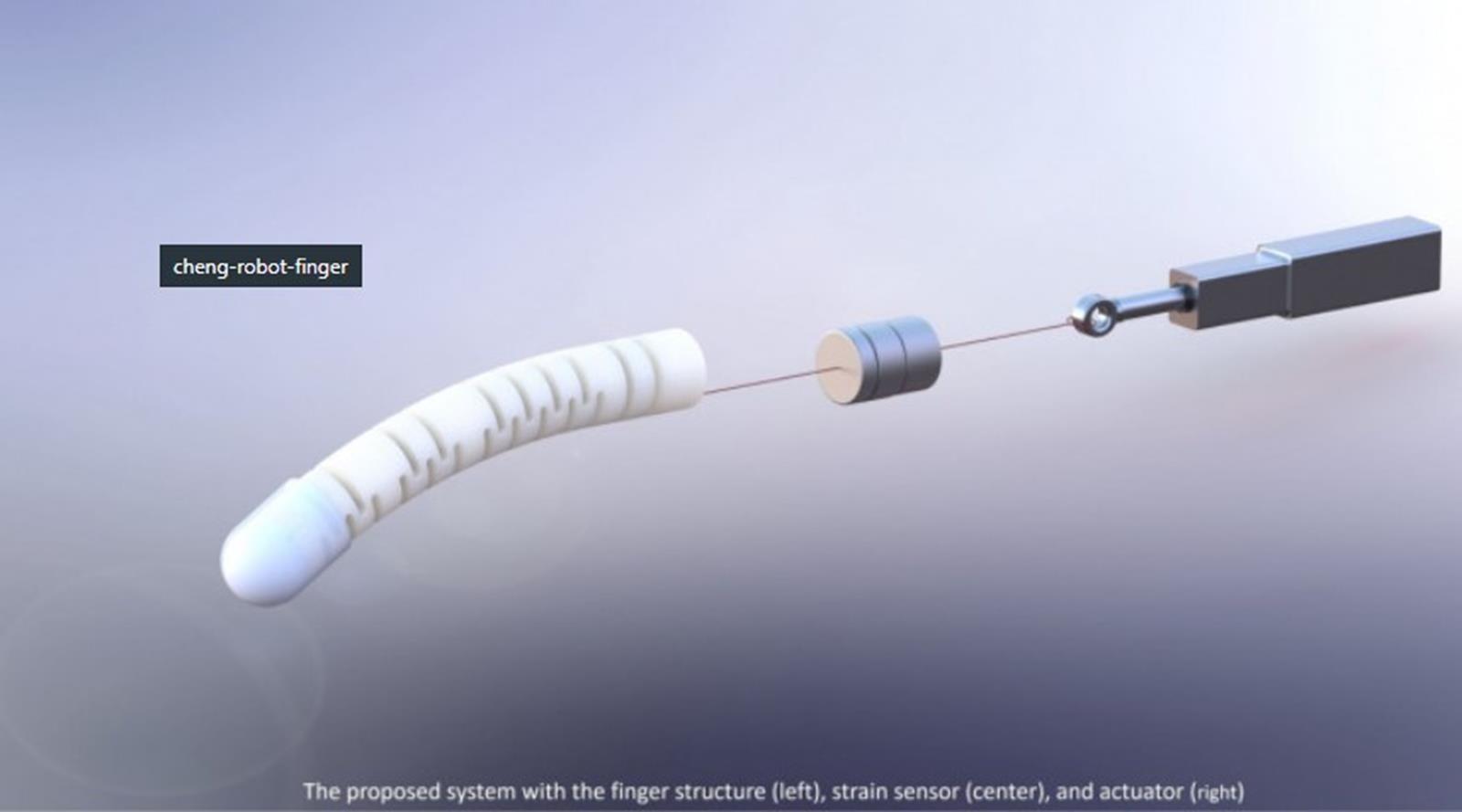
Tym razem naukowcy z pekińskiego Beihang University, wykorzystując dotychczasowe odkrycia i wnioski, opracowali nową skuteczną metodę, która może zapewnić robotom zmysł dotyku. W prezentującym ją prototypowym urządzeniu połączono siłownik liniowy, czujnik naprężenia i odpowiednik ścięgien w formie przewodu. Całość zwieńczono “miękkim” palcem robota z poprzedniego projektu naukowców, co w tym przypadku zapewnił projektowi palec o teksturze przypominającej ludzką skórę, który na dodatek radzi sobie lepiej w gromadzeniu bodźców dotykowych.
Czytaj też: Google zapowiedziało chipset Tensor. Produkujący Snapdragony Qualcomm uspokaja
Naukowcy poczynili kolejny ważny krok w dążeniu tego, aby zapewnić robotom zmysł dotyku. Tym razem połączono coś, co do tej pory pomijano z bardzo wrażliwymi na bodźce czujnikami
Jednak wykorzystanie w tym projekcie “miękkiego palca”, to tylko wierzchołek góry lodowej. Najważniejsze w nim jest to, że naukowcy opracowali nową technikę wyczuwania bodźców dotykowych związaną bezpośrednio właśnie z miękkością palca. Oparli się o zmyśle propriocepcji, który zapewnia ssakom świadomość sytuacyjną, a w tym pozycji i ruchu.
Czytaj też: Latające granaty Drone40 są obecnie testowane przez amerykańskich Marines
Idea […] opiera się na propriocepcji występującej u ludzi, która określa pozycję naszego ciała i obciążenie naszych ścięgien/stawów. Pomyśl o tym w ten sposób, że kiedy zakładasz opaskę na oczy i zakrywasz uszy, nadal możesz wyczuć ułożenie dłoni, pozycję ramion lub wagę torby na zakupy. Ta umiejętność jest znana jako propriocepcja.– tłumaczy jeden z badaczy, Chang Chen, w raporcie serwisu TechXplore.
To pierwszy raz, kiedy próbuje się zapewnić robotom zmysł dotyku poprzez wykorzystanie zjawiska propriocepcji, ale trudno się temu dziwić, bo ten zmysł bezpośrednio nie odpowiada za możliwość czucia – to taki “dodatek” w przypadku nas, ludzi. Jednak w robotach sprawa ma się o tyle lepiej, że bardziej wrażliwe czujniki są w stanie otworzyć naukowcom drogę do opracowywania wysoce precyzyjnych systemów dotykowych dla robotów.
Czytaj też: Dwunożny robot i uczenie maszynowe, czyli jak Cassie przebiegł rekordowe 5 km
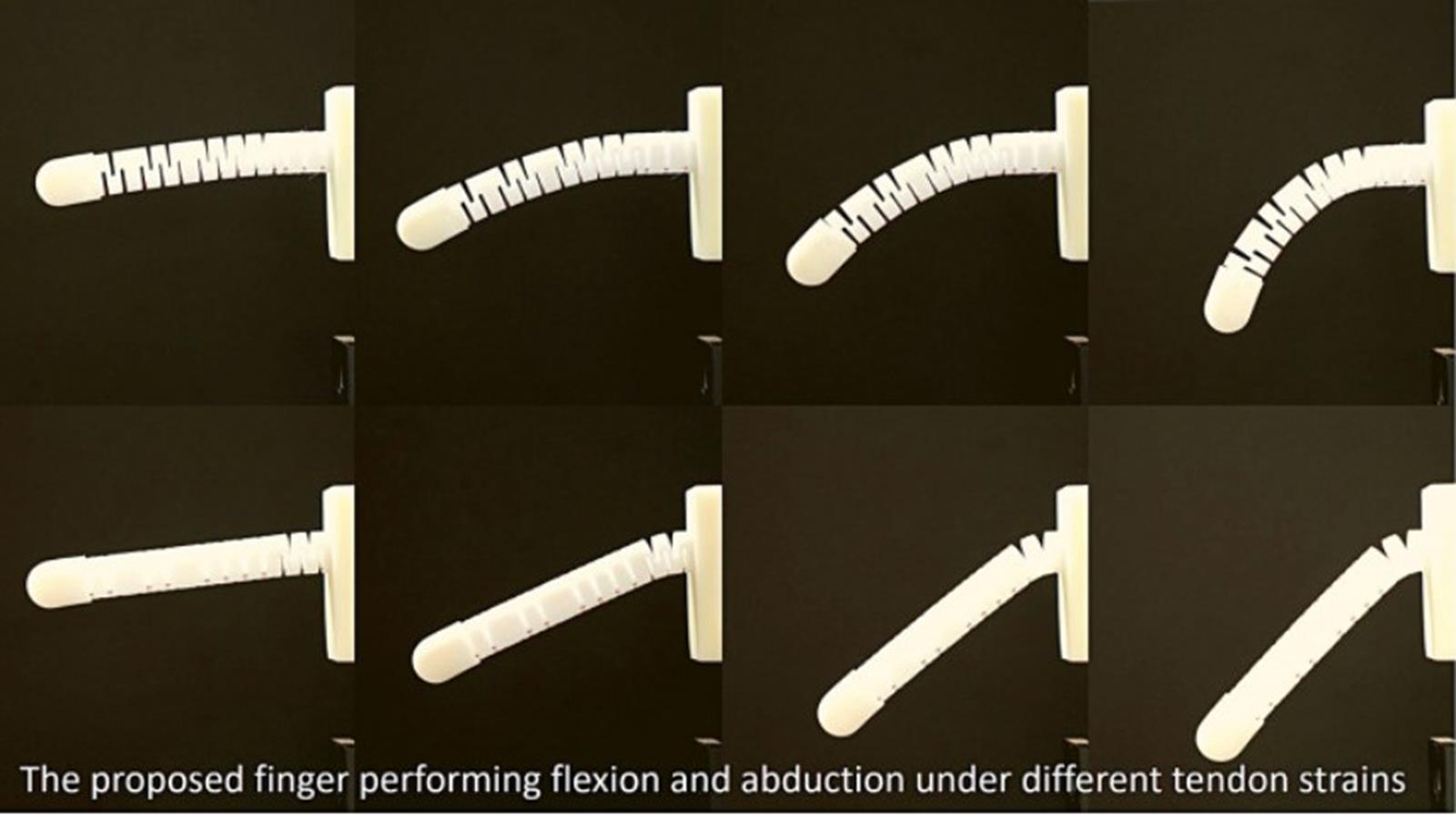
Działanie prototypowego palca robota sprowadza się do ruchu wymuszanego przez siłownik (odpowiednik mięśnia) i przewód (sztuczne ścięgno). Z kolei jego zmysł dotykowy obejmuje wysyłanie przez czujnik sygnałów zależnie od naprężenia oddziałującego na miękką sztuczną skórę palca. Finalnie wykorzystuje się narzędzia uczenia maszynowego do dekodowania sztywności i tekstury obiektu lub powierzchni, gdy ta styka się z nimi palec robota. W testach wykazano, że tego typu robotyczny palec oceniał dobrze sztywność w 99,7% przypadków i teksturę za każdym razem.
