
Mrówki działają niczym jeden wielki organizm w kolonii. Inspiracja nimi może znacząco poprawić dzisiejsze roje robotów
Decyzja co do zaprojektowania roju robotów na bazie tego, jak zachowują się kolonie mrówek, nie została podjęta bez konkretnego powodu. W rzeczywistości badania nad zachowaniem mrówek już dawno potwierdziły, że w pewnym sensie kolonia mrówek działa na podstawie algorytmów. W praktyce oznacza to, że poszczególne mrówki nie myślą akurat o swoim konkretnym zadaniu, bo zamiast tego kierują się zestawem instynktownych zasad i nieustannie komunikują się ze sobą nawzajem za pomocą swoich anten i szlaków feromonowych. Niczym jeden wielki organizm.
Czytaj też: Antymateria kluczem do znalezienia ciemnej materii? W CERN mają ręce pełne roboty
Tak jak jedna mrówka nie może zdziałać zbyt wiele, tak cała grupa w kooperacji jest już w stanie podejmować się pozornie niewyobrażalnych wyczynów. Stąd pomysł na roboty, a raczej skromne robociki, które potrafią współpracować, aby uciec z “więzienia”, nie potrzebując konkretnego planu. Zanim jednak naukowcy zaczęli je projektować, przeprowadzili eksperyment z małą grupą mrówek umieszczonych wewnątrz okrągłej pułapki otoczonej miękką, piaszczystą ścianą, aby zobaczyć, jak będą współpracować w celu ucieczki.
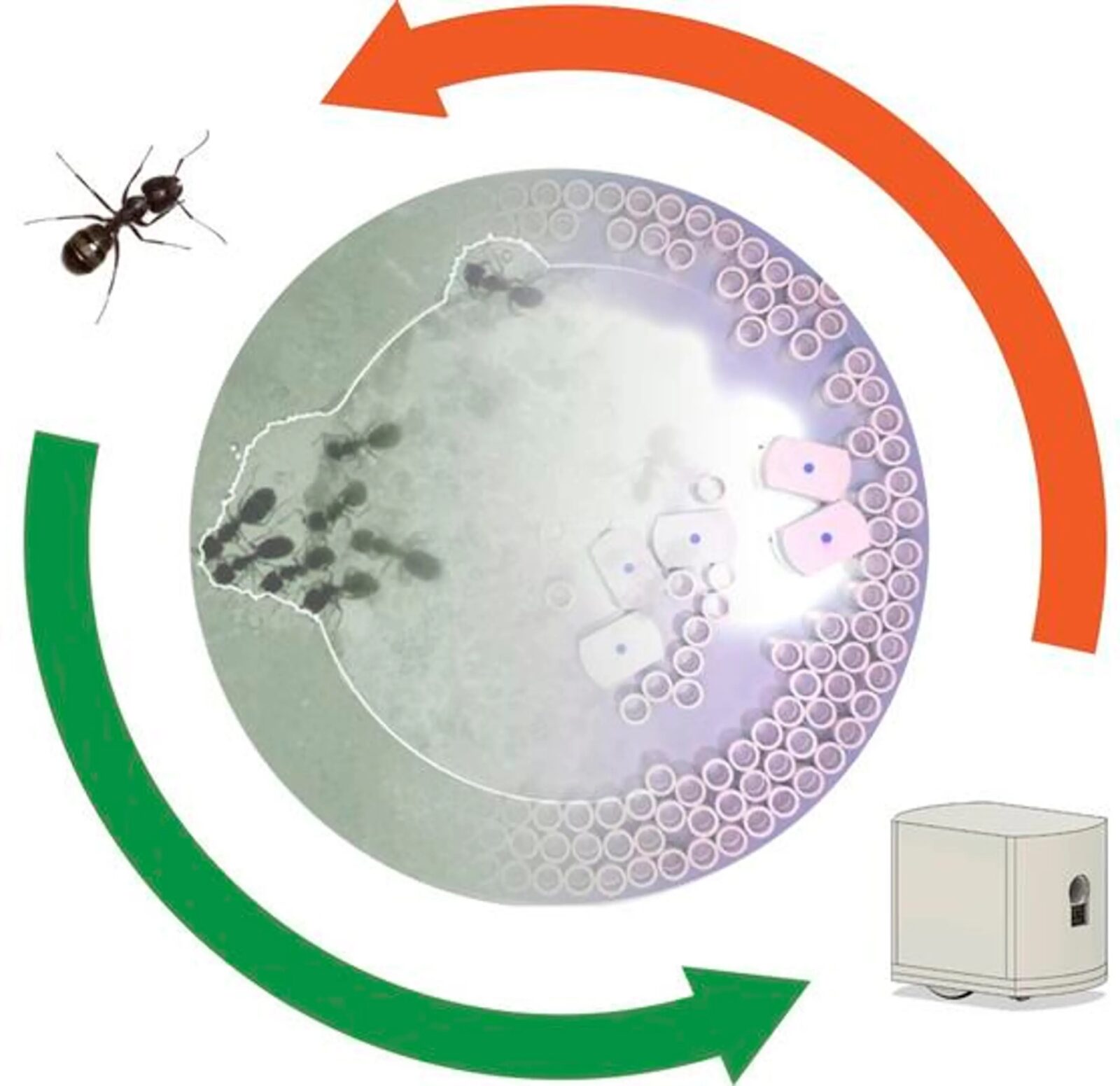
Zauważyli, że po pierwszym etapie błądzenia część mrówek zaczęła kopać w ścianach samotnie, a po chwili zbierać się w grupy, aby pracować nad jednym tunelem bardziej efektywnie i tak aż do przekopania się na drugą stronę. Gdy mrówki wpadały na siebie, komunikowały się za pomocą swoich antenek i z czasem zaczęły faworyzować miejsca, w których częściej wchodziły w interakcje, gdzie się gromadziły. To doprowadziło do skupienia ich wysiłków na kopaniu jednego tunelu wspólnie, a nie wielu w pojedynkę i tak aż do przebicia się na drugą stronę.
Czytaj też: Amerykańska artyleria samobieżna będzie jeszcze skuteczniejsza. Wesprą ją roboty zastępujące ludzi
Innymi słowy, mrówki zaczęły działać niczym sztuczna inteligencja. Na podstawie danych co do liczby kontaktów zaczęły nadawać priorytet danemu obszarowi, a następnie wpadały w istną pętlę, w której warunkiem wyjścia było przekopanie się na drugą stronę. Jak mrówki wpadły na ten pomysł? Zapewne łapiąc się jedynego pomysłu, który “miał dla nich sens”, kiedy wyczuły, że mogą sforsować ściany więzienia. Na podstawie tych obserwacji badacze stworzyli matematyczne modele, które naśladowały zachowanie mrówek i z ich wykorzystaniem zaprogramowali małe roboty RAnt, które zamiast chemicznych feromonów, posługiwały się polami świetlnymi (fotoromonami). Te stawały się tym jaśniejsze, im częściej roboty przechodziły obok nich.
Czytaj też: Imitacja idealna, czyli zrobotyzowana proteza odtwarzająca biomechanikę ludzkich stawów
RAnty musiały podążać za gradientem pola fotoromonów, unikać innych robotów w miejscach, gdzie gęstość pola była wysoka oraz zbierać w tychże miejscach przeszkody i przenosić je do obszarów o niskiej gęstości. Te trzy proste zasady pozwoliły RAntom współpracować w podobny sposób jak robiły to mrówki, szybko orientując się, że najlepszym sposobem ucieczki jest współpraca. Technika ta może być istotna dla projektowania rojów prostych robotów, które mogą wykonywać złożone zadania dzięki współpracy.
