
Człowiek nie funkcjonuje w świecie wyłącznie dzięki oczom i głowie. Kiedy podnosimy kubek, zaciskamy palce na owocu albo łapiemy gorące naczynie, nie wykonujemy abstrakcyjnych obliczeń na podstawie obrazu. Czujemy nacisk, temperaturę, fakturę, poślizg, opór i niepewność. Dopiero z tego powstaje sprawne działanie. Dlatego patrzę na nową sztuczną skórę opracowaną przez naukowców z Seoul National University jak na coś znacznie ciekawszego niż kolejny laboratoryjny czujnik. Dla mnie to jeden z tych drobnych, ale potencjalnie przełomowych kroków, które mogą zdecydować, czy robot przyszłości będzie tylko ruchomą kamerą z chwytakiem, czy faktycznym uczestnikiem fizycznego świata.
Roboty potrzebują nie tylko oczu, ale też odpowiednika skóry
Zespół kierowany przez prof. Seunga Hwana Ko z Wydziału Inżynierii Mechanicznej Seoul National University opracował sztuczną skórę, która potrafi jednocześnie wykrywać temperaturę i nacisk w jednym ultracienkim urządzeniu. Szczegóły zostały opisane w pracy pod tytułem Unisensory processing of interleaving memristive nanowires enabling multimodal sensing at human-scale resolution, która to została opublikowana w Nature Materials.
Najważniejsze nie jest jednak samo “czucie” temperatury i nacisku, bo tego typu kierunek widać było chociażby przy sztucznej skórze reagującej na dotyk, nacisk i temperaturę, gdzie kluczowe były osobne warstwy o różnych zadaniach. Nowe rozwiązanie z Korei Południowej idzie więc w inną stronę. Zamiast dokładać kolejne warstwy i budować coraz bardziej złożoną kanapkę sensorów, badacze chcą wyciągać różne typy informacji z jednej, cienkiej struktury.
Wydaje mi się, że właśnie tutaj zaczyna się najciekawsza część tej historii. Robot nie potrzebuje czujnika, który imponuje liczbami. Potrzebuje czegoś, co da się przykleić do palca, chwytaka, protezy albo miękkiego robota, a następnie używać bez budowania wokół tego całej delikatnej aparatury. W laboratorium można naturalnie zrobić bardzo wiele, ale w prawdziwym świecie wszystko staje się trudniejsze, bo prędzej czy później pojawia się brud, zużycie, opóźnienia, zasilanie, bezprzewodowa komunikacja i konieczność upchnięcia elektroniki w ograniczonej przestrzeni.
Jedna warstwa zamiast stosu czujników
Dotychczasowe multimodalne sensory dotykowe zwykle próbowały naśladować ludzką skórę przez dodawanie kolejnych elementów. Jeden odpowiadał za nacisk, drugi za temperaturę, kolejny za odkształcenie, jeszcze inny za wilgotność. Takie podejście jednak bardzo szybko zaczyna się mścić. Układ robi się grubszy, bardziej skomplikowany, wolniejszy i trudniejszy do skalowania. Pojawia się też problem z tym, czy różne bodźce są mierzone dokładnie w tym samym punkcie.
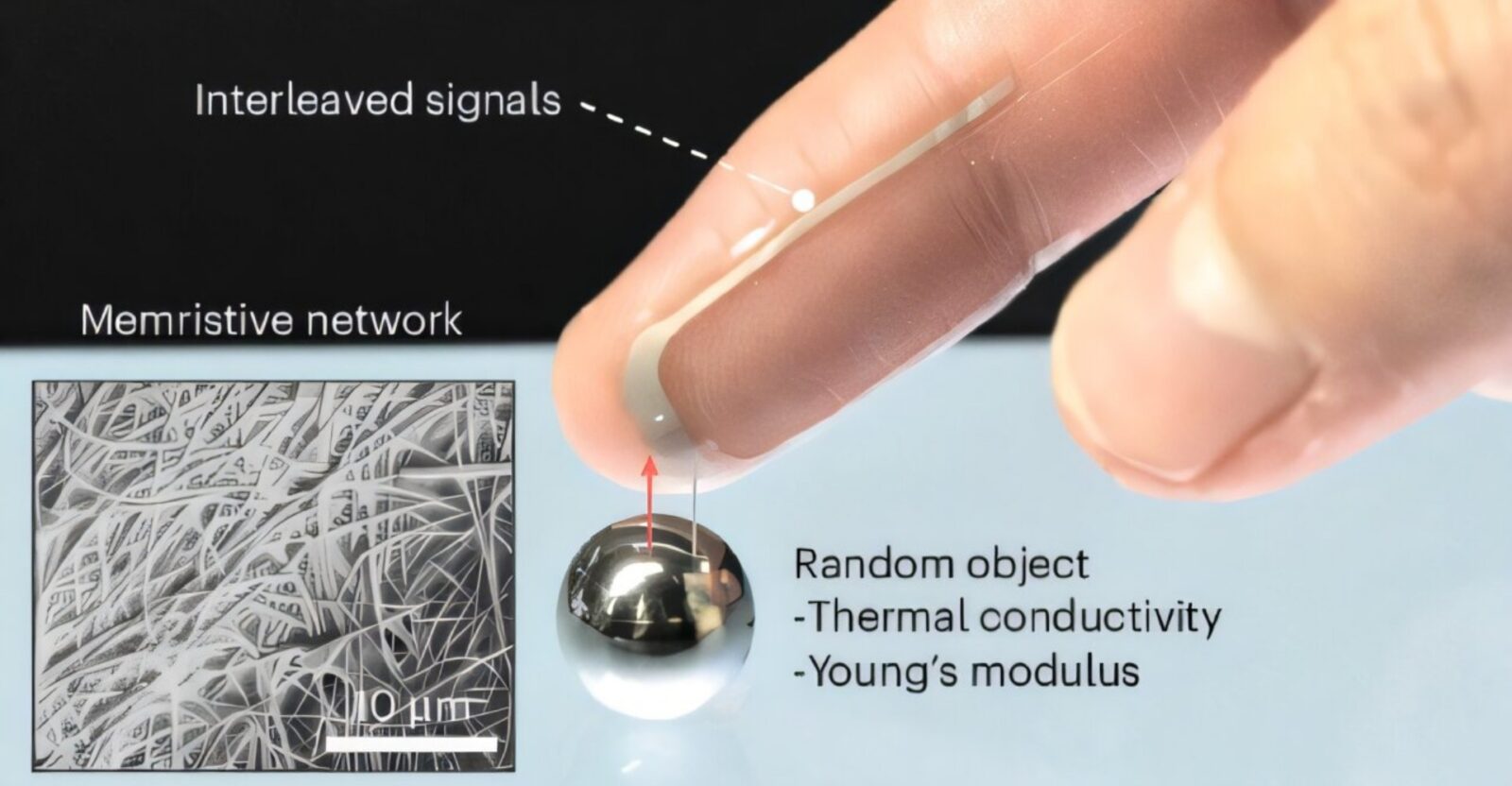
Dlatego też koreański zespół zastosował sieć nanodrutów o budowie rdzeń-powłoka, w której rdzeń został wykonany ze srebra, a powłokę z tlenku miedzi. Taki sensor działa jak memrystorowy układ zdolny do przełączania się między trybem termicznym i mechanicznym. Według badaczy może robić to 16 razy na sekundę w ramach jednej struktury, zbierając tym samym naprzemiennie dane o cieple i nacisku.
Czytaj też: W tym hotelu nie spotkasz ani jednego pracownika. Wszystko zrobią roboty
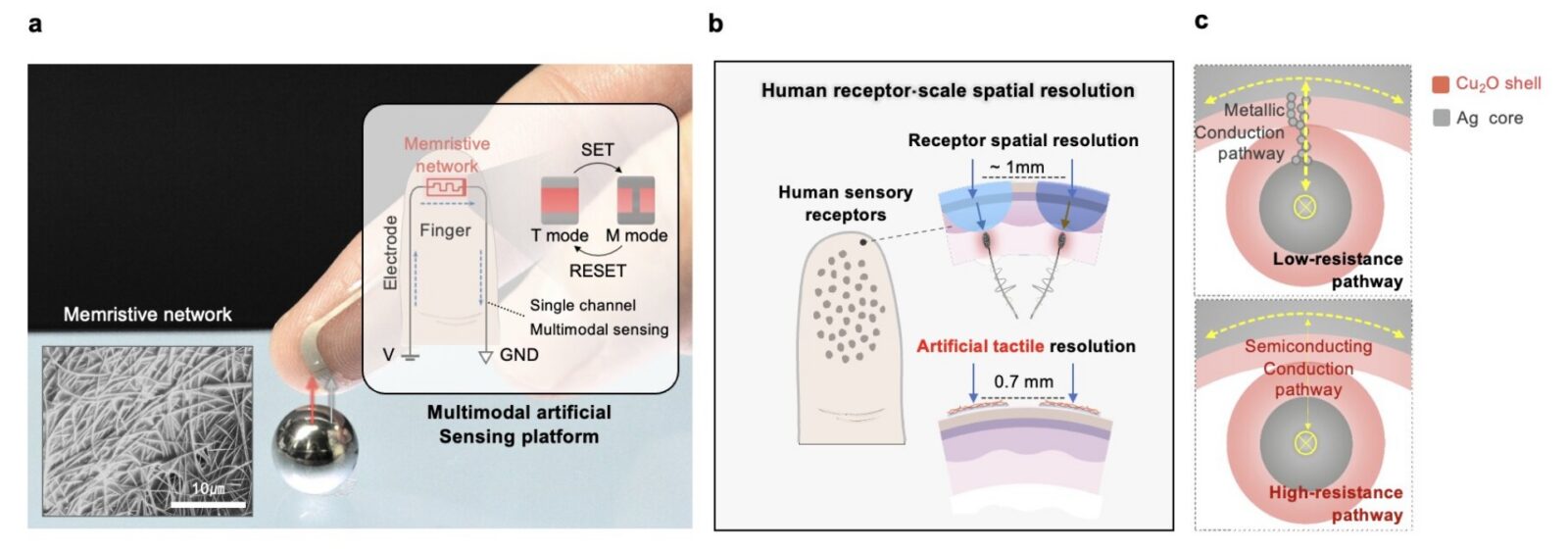
Na papierze wygląda to jak szczegół konstrukcyjny, ale w praktyce oznacza odejście od myślenia “doklejmy kolejny czujnik”. Sztuczna skóra zaczyna działać bardziej jak zintegrowany receptor, a nie jak pakiet osobnych modułów. Reakcja na bodźce mechaniczne ma zachodzić w czasie poniżej mikrosekundy, a reakcja termiczna na poziomie milisekund. Przy robotyce manipulacyjnej ma to znaczenie, bo chwytanie przedmiotów nie wybacza żadnych dużych opóźnień. Delikatny owoc, szklanka, miękka tkanina, nagrzany metalowy element – każdy z tych obiektów wymaga innego traktowania.
Sztuczna inteligencja rozpoznaje przedmioty po dotyku
Badacze połączyli pojedynczy doczepiany sensor z bezprzewodową płytką pomiarową i sztuczną inteligencją, a następnie sprawdzili, czy system potrafi identyfikować codzienne obiekty. W testach klasyfikacyjnych model trenowany na przeplatanych sygnałach z obu trybów osiągał około 95% skuteczności, podczas gdy użycie samej informacji termicznej albo samej mechanicznej dawało około 65%. Nawet przy ograniczonej ilości danych skuteczność utrzymywała się na poziomie 94,53%.
Czytaj też: Niby humanoid, a wcale nie wygląda jak człowiek. Francuzi pokazali robota przyszłości
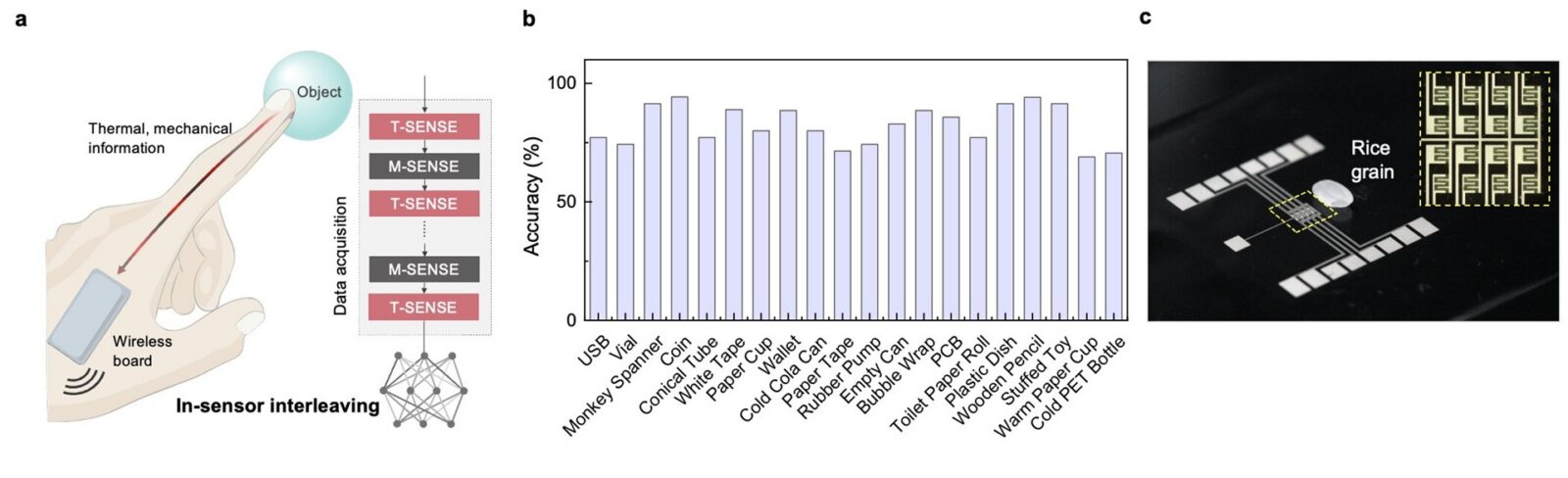
Jeszcze ciekawsza jest demonstracja z sensorem umieszczonym na opuszku palca. W takim scenariuszu system rozpoznawał 20 przedmiotów codziennego użytku z dokładnością 83%. Nie nazwałbym tego jeszcze “ludzkim dotykiem” w pełnym sensie, bo człowiek potrafi kompensować błędy przez ruch, kontekst, pamięć i doświadczenie. Wynik pokazuje jednak coś ważnego, bo fakt, że temperatura i nacisk osobno są przydatne, ale dopiero razem zaczynają przypominać sensowną percepcję dotykową.
Patrzę na to podobnie jak na ostatnie teksty o robotach, w których coraz częściej pojawia się motyw przejścia od efektownego demo do prawdziwej sprawności. Przy Atlasie uczącym się pracy zbyt ludzkiej dla klasycznej automatyki widać było, że sama mechanika i efektowny ruch już nie wystarczają. Przy małym robocie z MIT, który dostał “wielkie oczy”, chodziło o to samo z innej strony, bo autonomia zaczyna się od sensownego postrzegania świata. Teraz dochodzi dotyk, a to zmienia całą stawkę.
Zachwyt zachwytem, ale do prawdziwej skóry droga nadal jest długa
Badanie pokazuje świetny kierunek, ale pozostaje kilka oczywistych pytań. Jak taki sensor zniesie długotrwałe tarcie? Jak zachowa się po tysiącach cykli zginania? Co z wilgocią, potem, kurzem, tłuszczem, mikro uszkodzeniami i czyszczeniem? Czy produkcja dużych arkuszy sztucznej skóry będzie tania i możliwa do skalowania na masowy poziom? Jak łatwo da się skalibrować takie układy w różnych temperaturach otoczenia?
Dochodzi też kwestia interpretacji danych. Człowiek nie rozpoznaje świata dotykiem wyłącznie dlatego, że ma receptory. Równie ważny jest układ nerwowy, doświadczenie, ruch dłoni i nieustanna korekta zachowania. Robot z dobrą sztuczną skórą nadal potrzebuje modelu, który rozumie, co oznaczają te sygnały i jak przełożyć je na działanie. Inaczej dostaniemy tylko zaawansowany sensor bez wystarczająco mądrego ciała.
Jeśli idzie o sam potencjalny rytm wdrażania, to same protezy są tu oczywistym kierunkiem, bo użytkownik sztucznej kończyny potrzebuje nie tylko ruchu, ale też sprzężenia zwrotnego. Bez niego nawet najlepsza mechaniczna dłoń pozostaje w dużej mierze narzędziem sterowanym wzrokiem. Drugim polem są robotyczne chwytaki. W logistyce, przemyśle spożywczym, montażu elektroniki i opiece zdrowotnej dotyk jest czymś więcej niż dodatkiem. Robot musi wiedzieć, czy trzyma tabletkę, przewód, owoc, tkaninę, rozgrzaną część albo delikatny element, którego nie wolno ścisnąć zbyt mocno. Trzecim obszarem są miękkie roboty, czyli maszyny, które z definicji mają współpracować ze światem mniej brutalnie niż klasyczne metalowe ramiona przemysłowe.
