Nowa miękka, zmiennokształtna powierzchnia opracowana przez inżynierów z Rice University oraz Kyung Hee University wygląda dla mnie jak coś więcej niż laboratoryjna ciekawostka. W pewnym sensie jest to zapowiedź świata, w którym ekran, panel sterowania, skóra robota i miniaturowa makieta 3D zaczynają być tym samym urządzeniem.
Ten panel nie tylko reaguje na dotyk. On fizycznie zmienia siebie
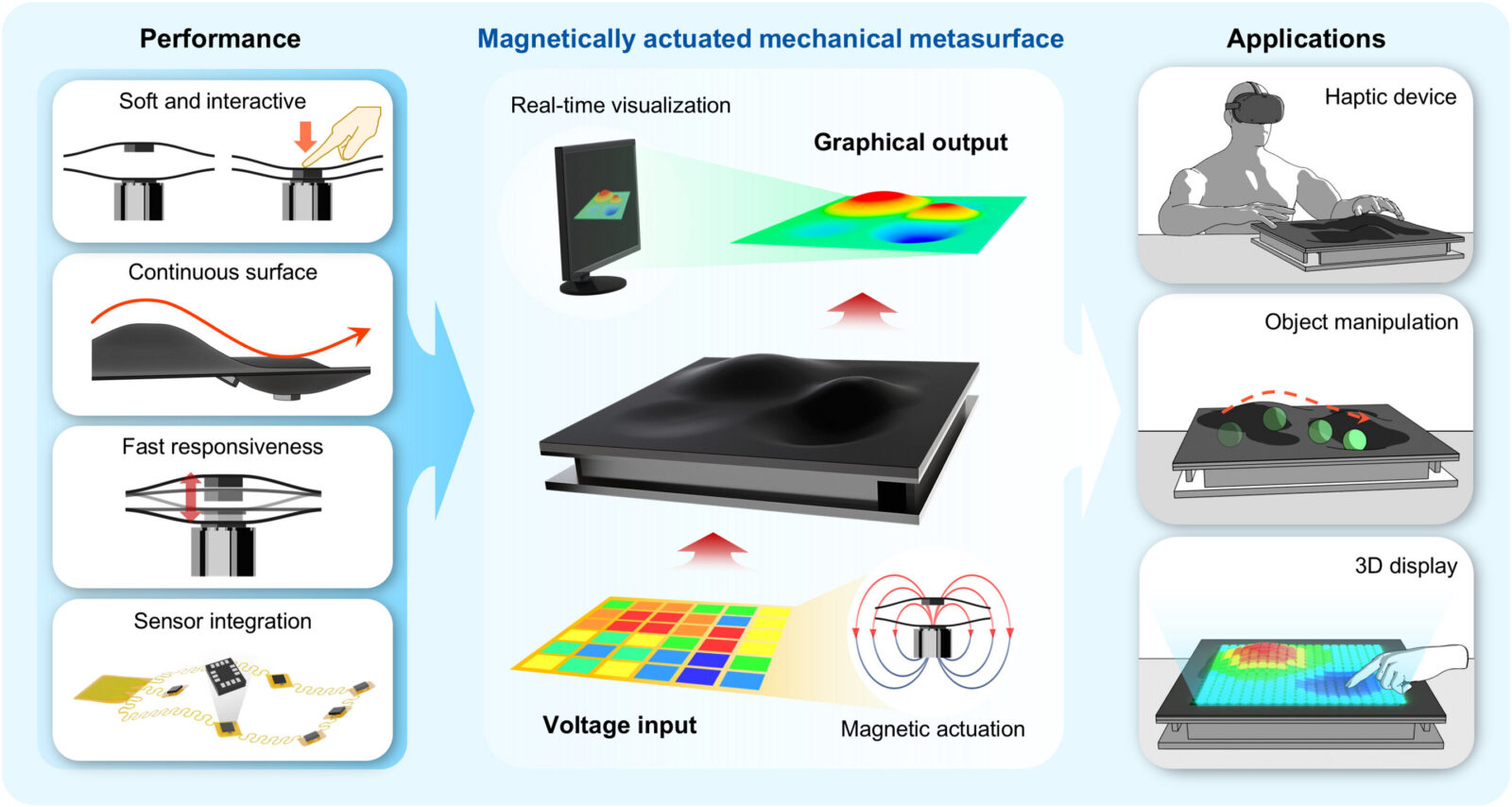
Nowa konstrukcja opisana w Science Advances została nazwana magnetycznie lewitowaną mechaniczną metapowierzchnią. Za tą nazwą kryje się zaś miękka platforma, która potrafi zmieniać kształt, wyczuwać własne odkształcenia i jednocześnie pokazywać informację wizualną za pomocą diod LED. Nie mówimy więc o klasycznym ekranie dotykowym, który po naciśnięciu co najwyżej zawibruje pod palcem. Tutaj sama powierzchnia podnosi się, zapada, faluje, przyjmuje wzory i reaguje na fizyczny kontakt.
Czytaj też: Robot dostał skórę, która czuje nacisk i temperaturę
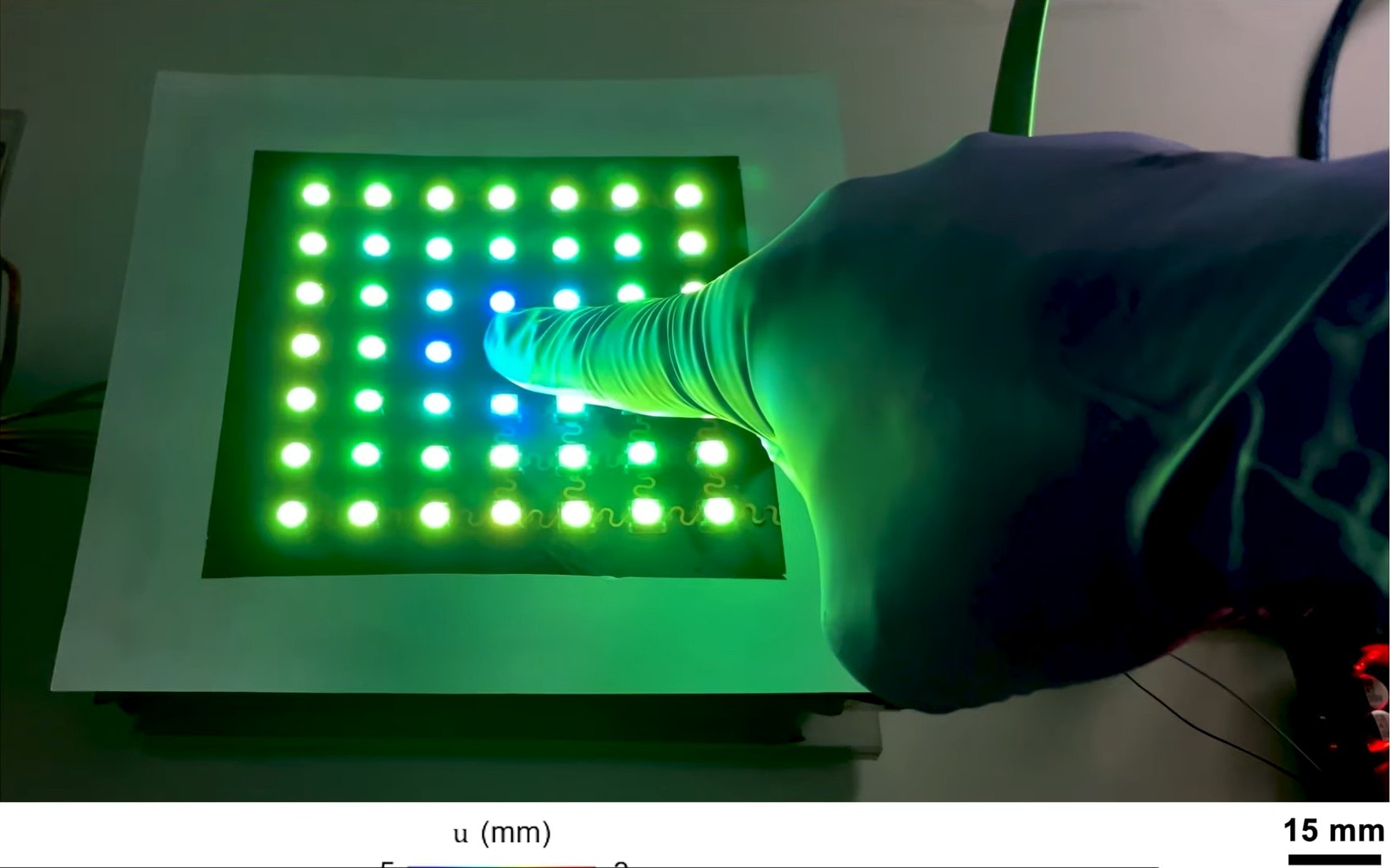
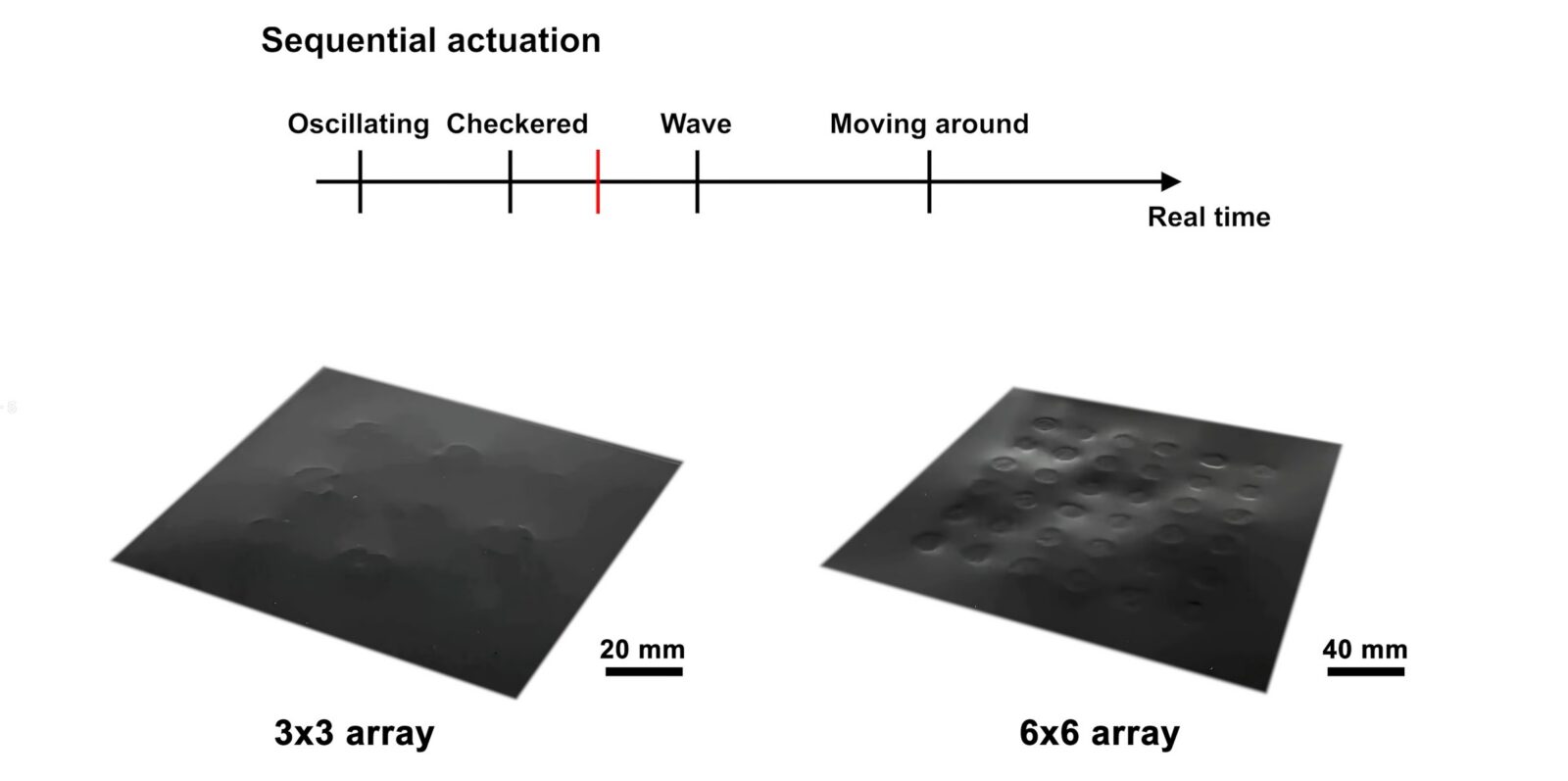
Sercem systemu jest matryca 6 x 6 miękkich elastomerowych “pikseli”, pod którymi pracują elektromagnesy. Dzięki przyciąganiu i odpychaniu magnetycznemu każdy z tych elementów może zostać podniesiony lub opuszczony z milimetrową precyzją. Taki układ ma dawać ponad 1030 możliwych konfiguracji powierzchni, więc oto właśnie informacja przestaje być wyłącznie obrazem, a zamiast tego staje się geometrią pod palcami.
Dla mnie najciekawsze jest jednak nie to, że naukowcy zrobili “ruchomy ekran”. Takie uproszczenie zabiłoby bowiem sens całej sprawy. Znacznie ważniejsze jest połączenie trzech rzeczy w jednej platformie, bo napędu, czucia i wizualizacji. Powierzchnia potrafi zmienić kształt, system wie, jaki kształt przyjęła, a użytkownik może jednocześnie zobaczyć reakcję dzięki zintegrowanej matrycy RGB LED 7 x 7. To zaś z automatu zaczyna przypominać nie wyświetlacz, ale miękkie elektroniczne ciało.
Metapowierzchnia, czyli materiał zaprojektowany jak interfejs
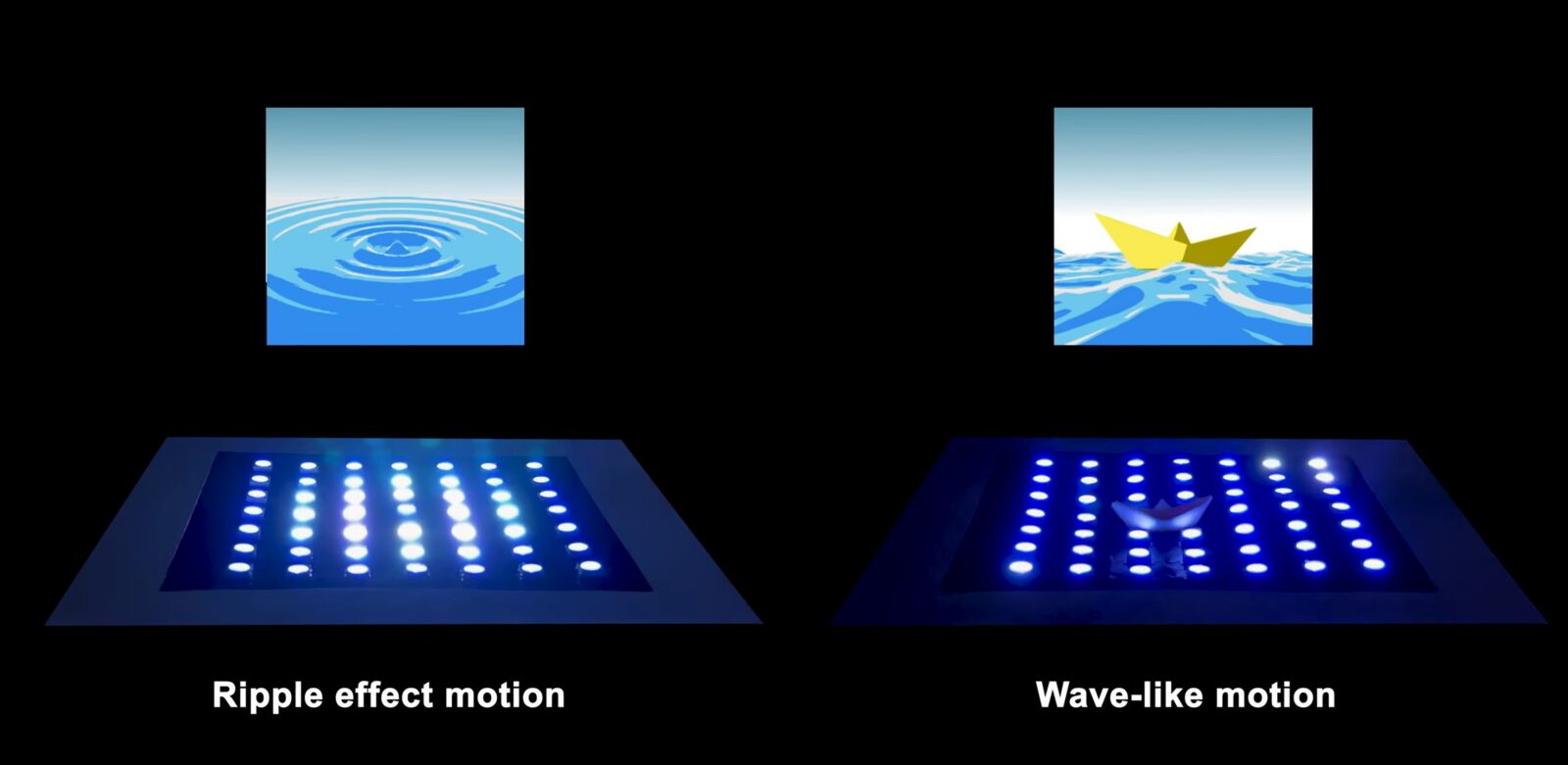
W przypadku “metapowierzchni” mowa o powierzchni, której właściwości nie wynikają wyłącznie z materiału, lecz także z zaprojektowanej struktury. W tym przypadku nie dostajemy więc jednego kawałka gumy, który odkształca się przypadkowo, a odpowiednio uporządkowany układ miękkich komórek sterowanych elektromagnesami. Badacze pokazali zresztą fale, efekty przypominające kręgi na wodzie, wzory szachownicy, a nawet ruch przypominający skurcz i rozkurcz ludzkiego serca. W jednej z demonstracji powierzchnia prowadziła krople wody tak, aby układały się w różne litery. W innej symulowała fale pod miniaturową papierową łódką, a światła LED zostały zsynchronizowane z ruchem powierzchni, żeby wizualnie podkreślić przepływ.
Czytaj też: Roboty nie przejmą pola walki jak w filmach. Zrobią coś gorszego
Patrzę na to trochę jak na fizyczny odpowiednik animacji komputerowej. Różnica polega na tym, że w tym przypadku cała animacja nie dzieje się na ekranie, a w materii. Powierzchnia nie udaje fali przez piksele. Ona robi falę, choć oczywiście w miniaturowej, kontrolowanej skali. Właśnie ten przeskok wydaje mi się najważniejszy, bo wiele technologii przyszłości utknęło dziś w świecie wizualnych symulacji. Pokazujemy rzeczy coraz lepiej, ale nadal ich nie dotykamy, a to problem zarówno dla naszych funkcji poznawczych, jak i… samych robotów.
Raudel Avila z Rice University zwrócił uwagę na coś pozornie oczywistego – ludzie nie są sztywni, a ze światem komunikują się przez dotyk, ruch i deformację. Trudno się z tym nie zgodzić, bo wystarczy wziąć do ręki owoc, szklankę albo tkaninę. Nie patrzymy więc tylko na przedmiot. Sprawdzamy opór, ciężar, fakturę, temperaturę i reakcję pod naciskiem. Podobny problem widać przy sztucznej skórze, która czuje nacisk i temperaturę, bo robotyka coraz wyraźniej ucieka od samego “widzenia” w stronę fizycznego rozumienia świata.
W tym kontekście metapowierzchnia Rice i Kyung Hee University nie jest wyłącznie nowym panelem. Jest raczej próbą odpowiedzi na pytanie, jak maszyna może komunikować się z człowiekiem w sposób bardziej naturalny niż przez ikonę, suwak i płaski przycisk. Dotychczasowe ekrany dotykowe dały nam szybkość i prostotę, ale zabrały sporo fizycznej informacji zwrotnej. Dotknięcie przycisku na ekranie i dotknięcie prawdziwego przełącznika to nadal dwa różne doświadczenia.

Tutaj zaczyna się obietnica takich powierzchni. Panel w samochodzie mógłby fizycznie wybrzuszać najważniejsze przyciski tylko wtedy, gdy te są potrzebne. Interfejs w samolocie szkoleniowym mógłby zaś zmieniać geometrię zależnie od trybu. Narzędzie edukacyjne mogłoby pokazywać dzieciom topografię, fale, pracę serca albo drgania nie jako płaską ilustrację, ale jako powierzchnię reagującą pod dłonią. Osoba niewidoma mogłaby dostać dynamiczną mapę, która nie tylko mówi, ale faktycznie układa się pod palcami.
Lista zastosowań jest długa, ale nie wszystkie są równie blisko
Naukowcy wskazują na zastosowania w edukacji dotykowej, miękkiej robotyce, urządzeniach noszonych, rozszerzonej i wirtualnej rzeczywistości oraz technologiach wspierających osoby z dysfunkcjami wzroku. Najbardziej realistyczne wydają mi się na początku zastosowania niszowe, droższe i kontrolowane, czyli symulatory, edukacja specjalistyczna, rehabilitacja, protetyka i zaawansowane panele testowe.
W robotyce ten kierunek dobrze łączy się z szerszym trendem miękkich maszyn. Pisałem już o tym przy miękkim robocie inspirowanym płaszczką, gdzie istotna była nie sama elastyczność, ale pomysł wbudowania funkcji w odkształcalne ciało. Tutaj dostajemy podobną filozofię po stronie interfejsu, a wedle tego podejścia urządzenie nie ma być sztywnym szkieletem z doklejoną warstwą “miękkości”, lecz systemem, w którym ruch, informacja i czucie są projektowane razem.
W protetyce taka logika może mieć jeszcze większe znaczenie. Podobny problem widać przy protezie ręki, którą mózg może traktować bardziej naturalnie, bo sama mechaniczna sprawność dłoni nie wystarcza, jeśli użytkownik musi przez cały czas kontrolować każdy chwyt wzrokiem. Dobra proteza przyszłości powinna nie tylko łapać obiekty, ale też przekazywać użytkownikowi sensowną informację zwrotną. Metapowierzchnia nie jest jeszcze takim rozwiązaniem, ale pokazuje kierunek – miękka elektronika powinna mówić językiem nacisku, kształtu i deformacji, nie tylko wykresu na ekranie.
Czytaj też: Klasyk z klasy robotniczej dostał serce z przyszłości. Nowy Escort zawstydza niejedno Porsche
VR i AR? Tutaj mam największe wątpliwości i zarazem największą ciekawość. Branża od lat obiecuje nam “zanurzenie” w wirtualnym świecie, ale nadal najczęściej sprowadza się ono do obrazu przed oczami, dźwięku w słuchawkach i wibracji w kontrolerze. Prawdziwa haptyka wymaga czegoś bardziej fizycznego. Zmiennokształtna powierzchnia mogłaby symulować kształty, nacisk, strukturę albo ruch pod palcami, ale zanim trafi do domowego zestawu VR, musi przejść przez ścianę miniaturyzacji, ceny, poboru energii i trwałości.
Jednak mimo tych zastrzeżeń uważam, że ta praca jest ważna, bo dobrze pokazuje zmianę myślenia o elektronice. Przez dekady dokładaliśmy komputerom moc, rozdzielczość, jasność i szybkość odświeżania. Teraz coraz częściej zaczynamy pytać, czy urządzenie potrafi wejść z człowiekiem w lepszy kontakt fizyczny. Nie tylko “wyświetlić”, ale też “odpowiedzieć”. Nie tylko “zarejestrować dotyk”, ale też nadać mu formę.
Źródła: Rice University, Science Advances
